 "IKE_NAV"( not IKE IKE NAV )does not imply a superior navigation package
"IKE_NAV"( not IKE IKE NAV )does not imply a superior navigation package
![]()
![]()
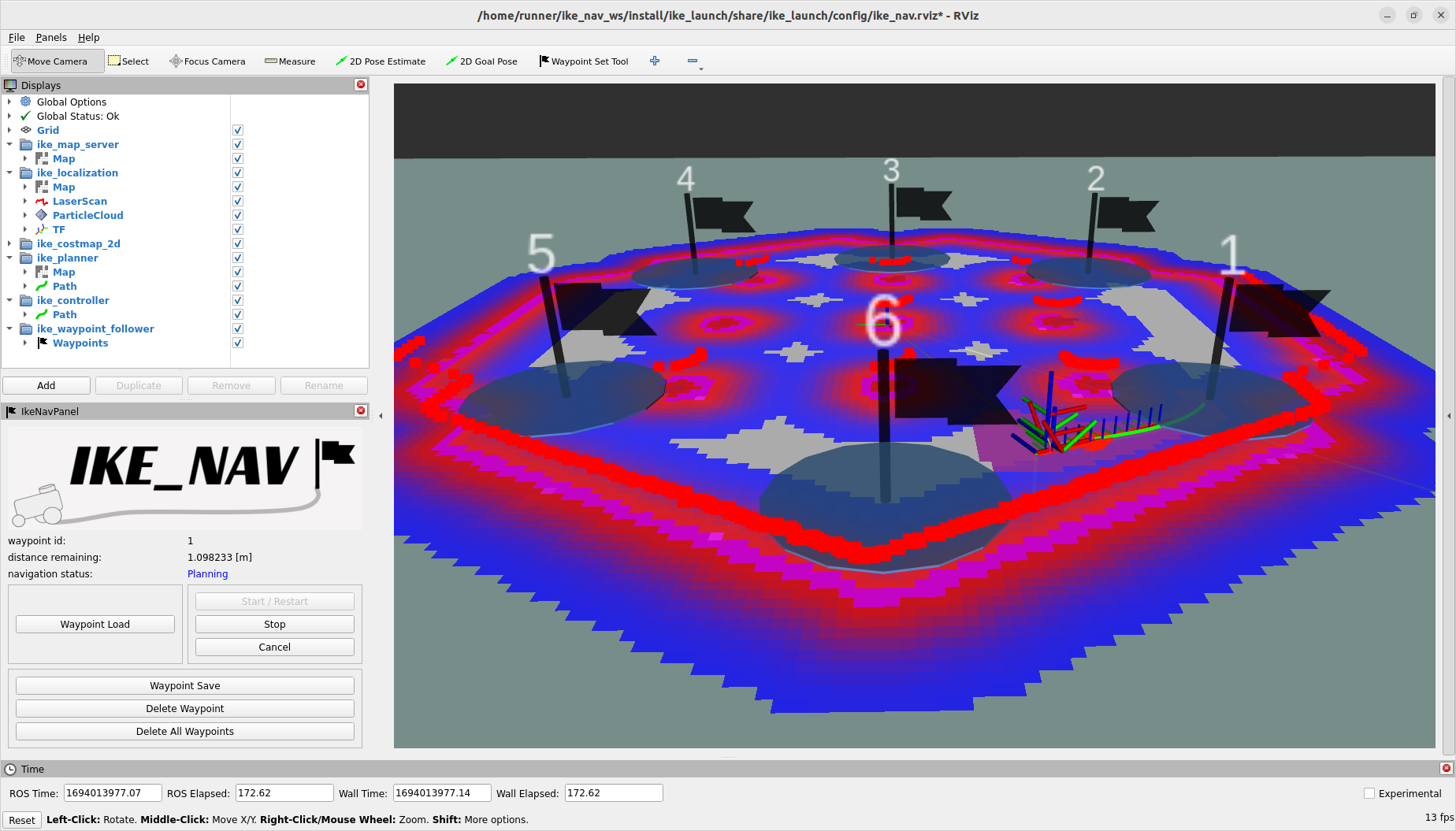
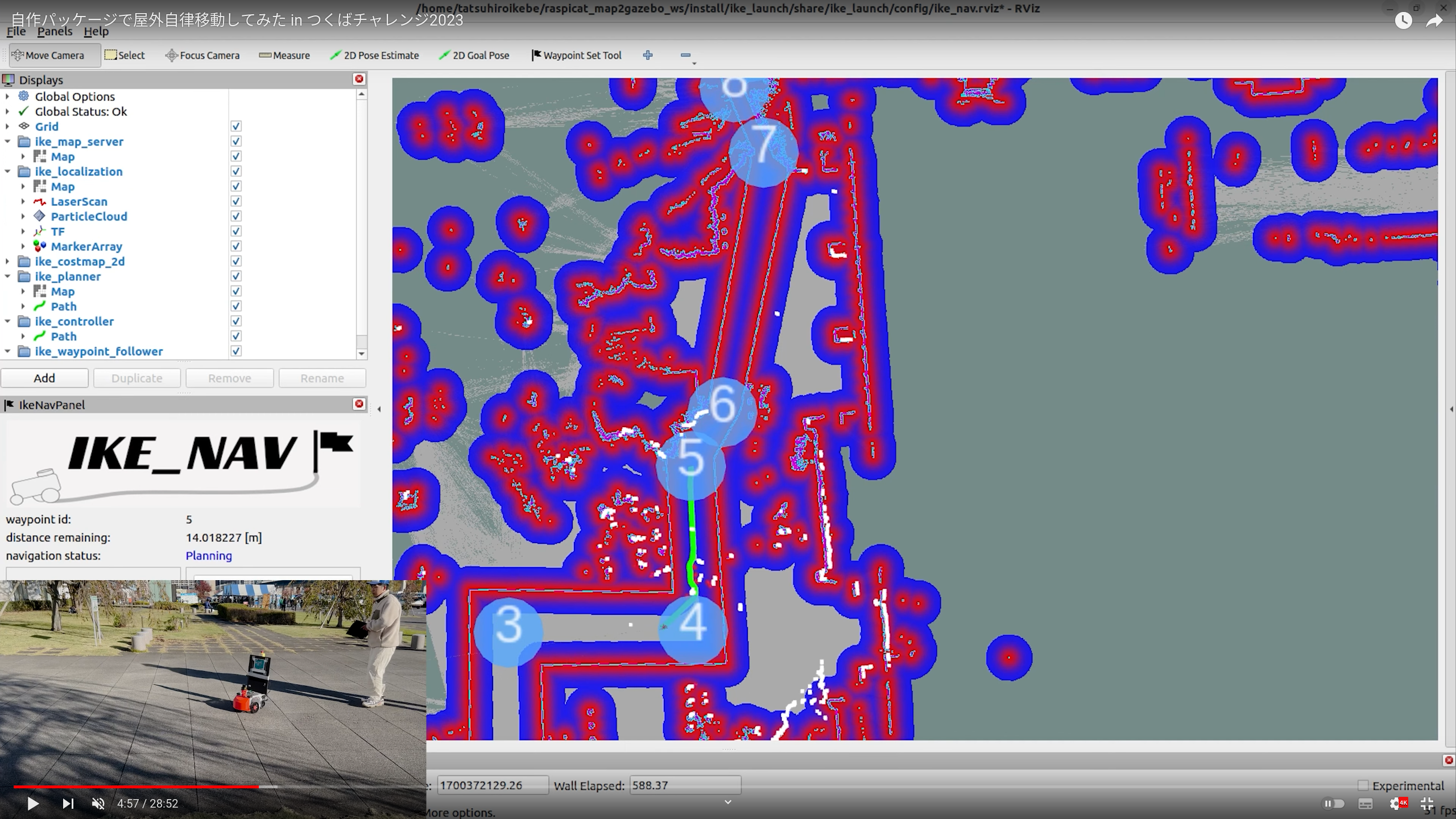
IKE_NAVは、C++実装によるシンプルなROS 2ナビゲーションスタックです。
2次元地図nav_msgs/OccupancyGrid、2次元センサ情報sensor_msgs/LaserScan、移動ロボットのオドメトリ情報tf2_msgs/TFMessageを入力し、与えられた目標位置までに到達するための速度geometry_msgs/Twistを出力します。

docker run -it \
--rm \
--net=host \
--env="DISPLAY=$DISPLAY" \
--user $(id -u):$(id -g) \
--mount type=bind,source=/usr/share/zoneinfo/Asia/Tokyo,target=/etc/localtime \
--name ike_nav \
ghcr.io/uhobeike/ike_nav:humble
Quick_demo_IKE_NAV.mp4
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws
git clone https://github.com/uhobeike/ike_nav.git src/ike_nav
rosdep update
rosdep install -i -y --from-path src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/setup.bash
- ウェイポイントのセット時、稀に出力され、ナビゲーションが停止する
[rviz2-5] [ERROR] [1693991158.604136358] [rviz2]: ItemIdentityException: Material with the name goal_flag_material_0.244069 already exists. in ResourceManager::add at ./.obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceManager.cpp (line 148)
- 障害物回避の安定化
- ウェイポイント通過後の安定化
- グローバルコストマップ、尤度場の作成の高速化
IKE_NAVは、LGPL-3.0-or-laterとApache-2.0のライセンスで構成されています。
詳しくは、各パッケージのpackage.xmlファイルを確認してください。
