


traffic light operating , Click image to link to YouTube video.
traffic bar operating , Click image to link to YouTube video.
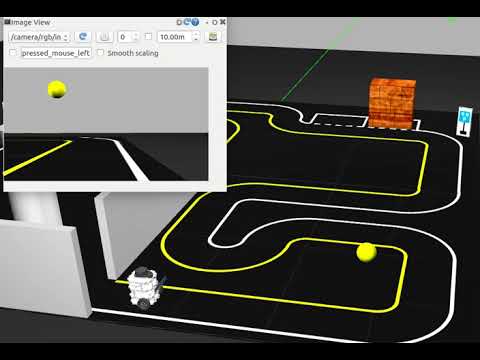
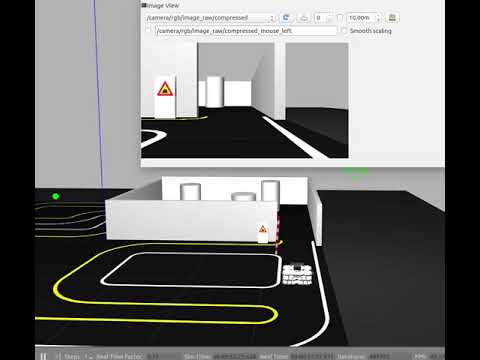
I made it based on RBIZ 2017 autorace stadium
- First install TurtleBot3 package http://emanual.robotis.com/docs/en/platform/turtlebot3/pc_setup/#pc-setup
$ sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers
$ cd ~/catkin_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make- Second install turtlebot3_traffic_course package
$ cd ~/catkin_ws/src/
$ git clone https://github.com/AuTURBO/gazebo_traffic_course.git
$ cd ~/catkin_ws && catkin_make- Add Camera to turtlebot3 burger simulation model.
Default turtlebot3 burger simulation model don't support camera and depth camera.
If you wand to add camera and depth camera to turtlebot3 burger simulation model,
you modify turtlebot3_burger.gazebo.xacro and turtlebot3_burger.urdf.xacro
$ cp ~/catkin_ws/src/gazebo_traffic_course/burger_camera/turtlebot3_burger.gazebo.xacro ~/catkin_ws/src/turtlebot3/turtlebot3_description/urdf/
$ cp ~/catkin_ws/src/gazebo_traffic_course/burger_camera/turtlebot3_burger.urdf.xacro ~/catkin_ws/src/turtlebot3/turtlebot3_description/urdf/- Run Gazebo World
If you want turtlebot3 burger. Simulation lane width is 30 cm.
$ roslaunch turtlebot3_traffic_course course_burger.launch If you want turtlebot3 waffle. Simulation lane width is 40 cm.
$ roslaunch turtlebot3_traffic_course course_waffle.launch- Run control, you can contol turtlebot3 model at gazebo simulation world
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch- plugin build to control traffic light and bar.
$ cd ~/catkin_ws/src/gazebo_traffic_course/gazebo_plugin_tutorial/build
$ cmake ../
$ make