scipy_dae - solving differential algebraic equations (DAE's) and implicit differential equations (IDE's) in Python
![]()

Python implementation of solvers for differential algebraic equations (DAE's) and implicit differential equations (IDE's) that should be added to scipy one day.
Currently, two different methods are implemented.
- Implicit Radau IIA methods of order 2s - 1 with arbitrary number of odd stages.
- Implicit backward differentiation formula (BDF) of variable order with quasi-constant step-size and stability/ accuracy enhancement using numerical differentiation formula (NDF).
More information about both methods are given in the specific class documentation.
The Kármán vortex street solved by a finite element discretization of the weak form of the incompressible Navier-Stokes equations using FEniCS and the three stage Radau IIA method.

The Robertson problem of semi-stable chemical reaction is a simple system of differential algebraic equations of index 1. It demonstrates the basic usage of the package.
import numpy as np
import matplotlib.pyplot as plt
from scipy_dae.integrate import solve_dae
def F(t, y, yp):
"""Define implicit system of differential algebraic equations."""
y1, y2, y3 = y
y1p, y2p, y3p = yp
F = np.zeros(3, dtype=np.common_type(y, yp))
F[0] = y1p - (-0.04 * y1 + 1e4 * y2 * y3)
F[1] = y2p - (0.04 * y1 - 1e4 * y2 * y3 - 3e7 * y2**2)
F[2] = y1 + y2 + y3 - 1 # algebraic equation
return F
# time span
t0 = 0
t1 = 1e7
t_span = (t0, t1)
t_eval = np.logspace(-6, 7, num=1000)
# initial conditions
y0 = np.array([1, 0, 0], dtype=float)
yp0 = np.array([-0.04, 0.04, 0], dtype=float)
# solver options
method = "Radau"
# method = "BDF" # alternative solver
atol = rtol = 1e-6
# solve DAE system
sol = solve_dae(F, t_span, y0, yp0, atol=atol, rtol=rtol, method=method, t_eval=t_eval)
t = sol.t
y = sol.y
# visualization
fig, ax = plt.subplots()
ax.plot(t, y[0], label="y1")
ax.plot(t, y[1] * 1e4, label="y2 * 1e4")
ax.plot(t, y[2], label="y3")
ax.set_xlabel("t")
ax.set_xscale("log")
ax.legend()
ax.grid()
plt.show()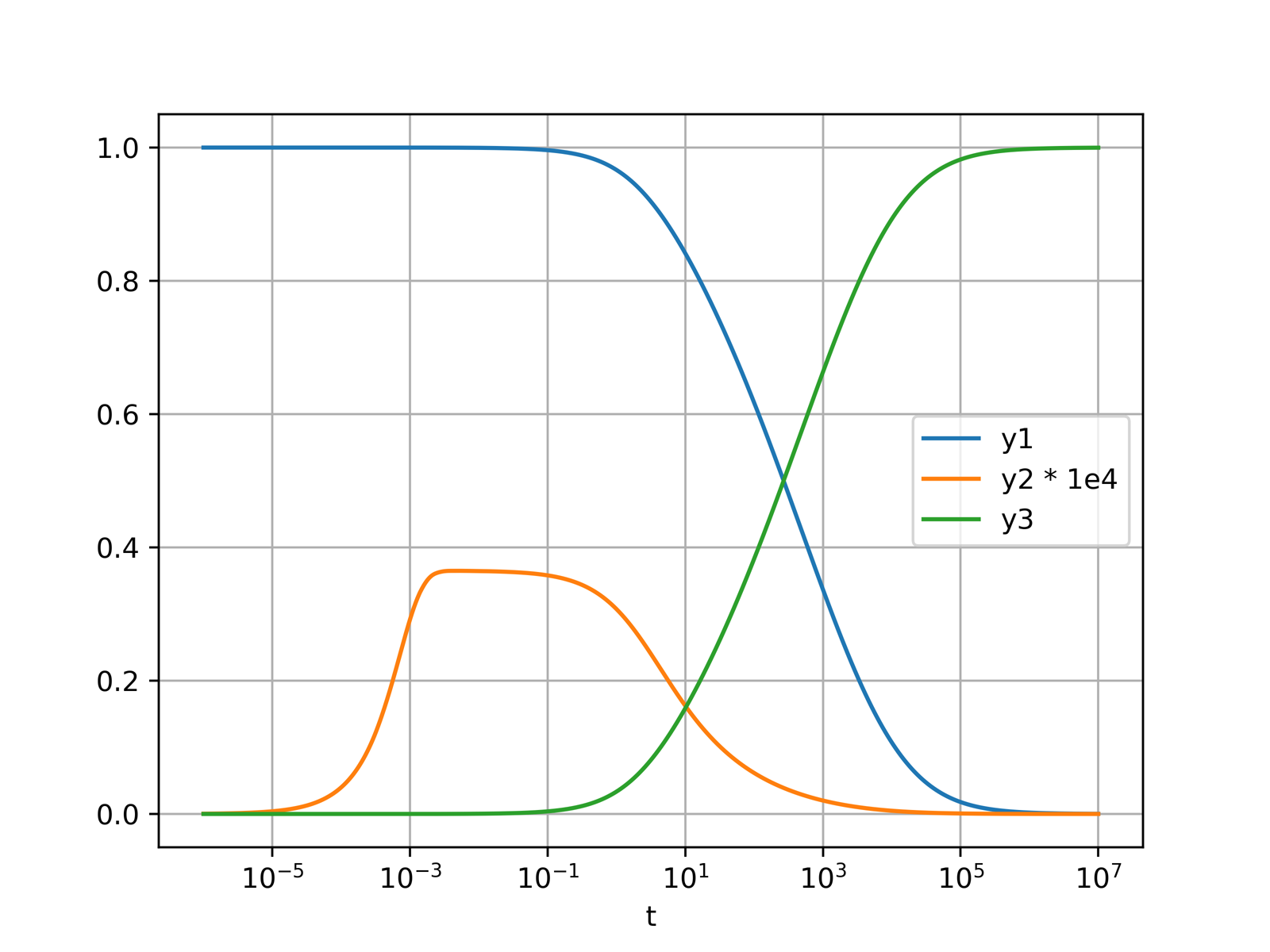
More examples are given in the examples directory, which includes
- ordinary differential equations (ODE's)
- differential algebraic equations (DAE's)
- implicit differential equations (IDE's)
In order to investigate the work precision of the implemented solvers, we use different DAE examples with differentiation index 1, 2 and 3 as well as IDE examples.
Brenan's index 1 problem is described by the system of differential algebraic equations
For the consistent initial conditions
This problem is solved for
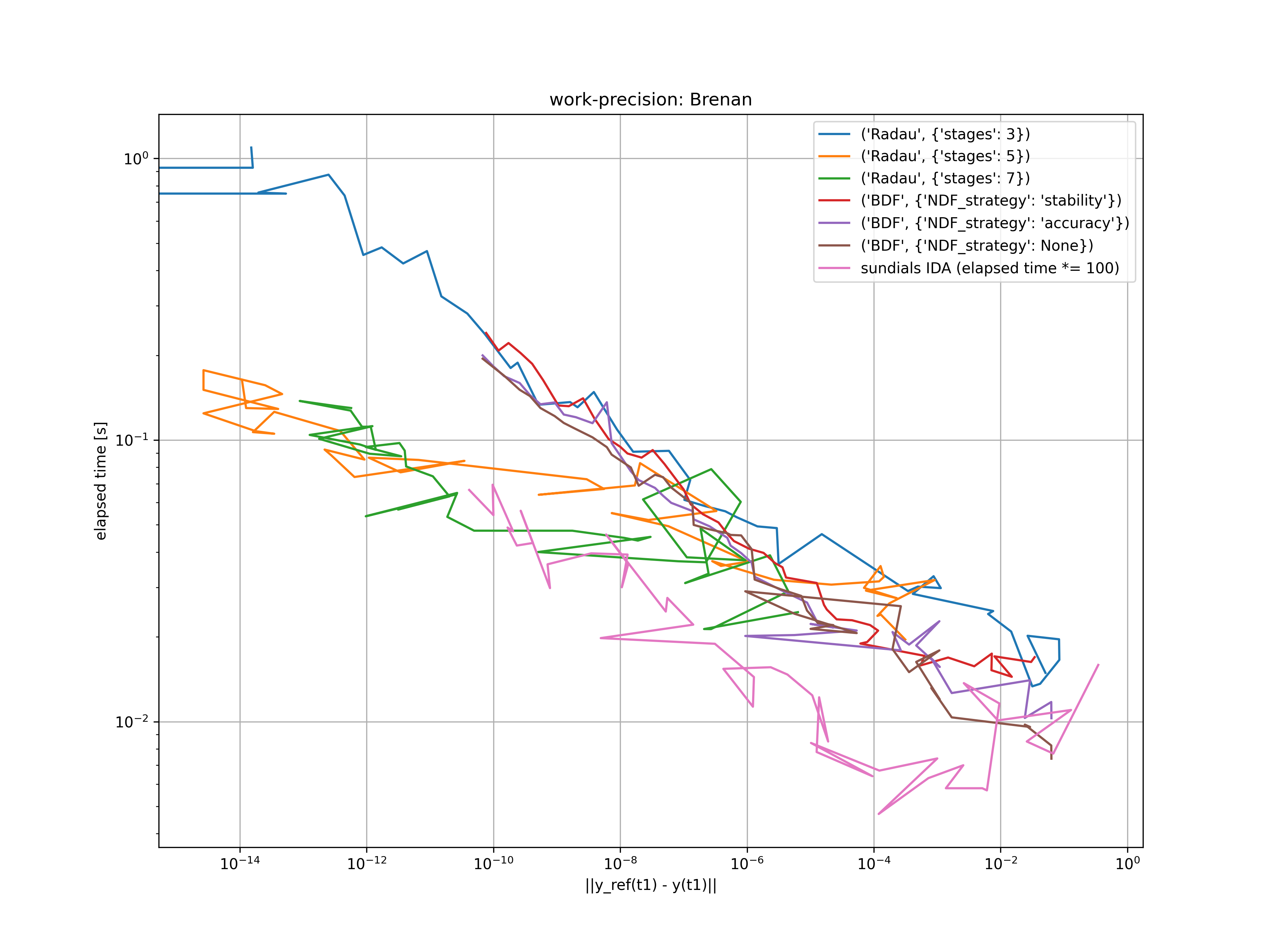
Clearly, the family of Radau IIA methods outplay the BDF/NDF methods for low tolerances. For medium to high tolerances, both methods are appropriate.
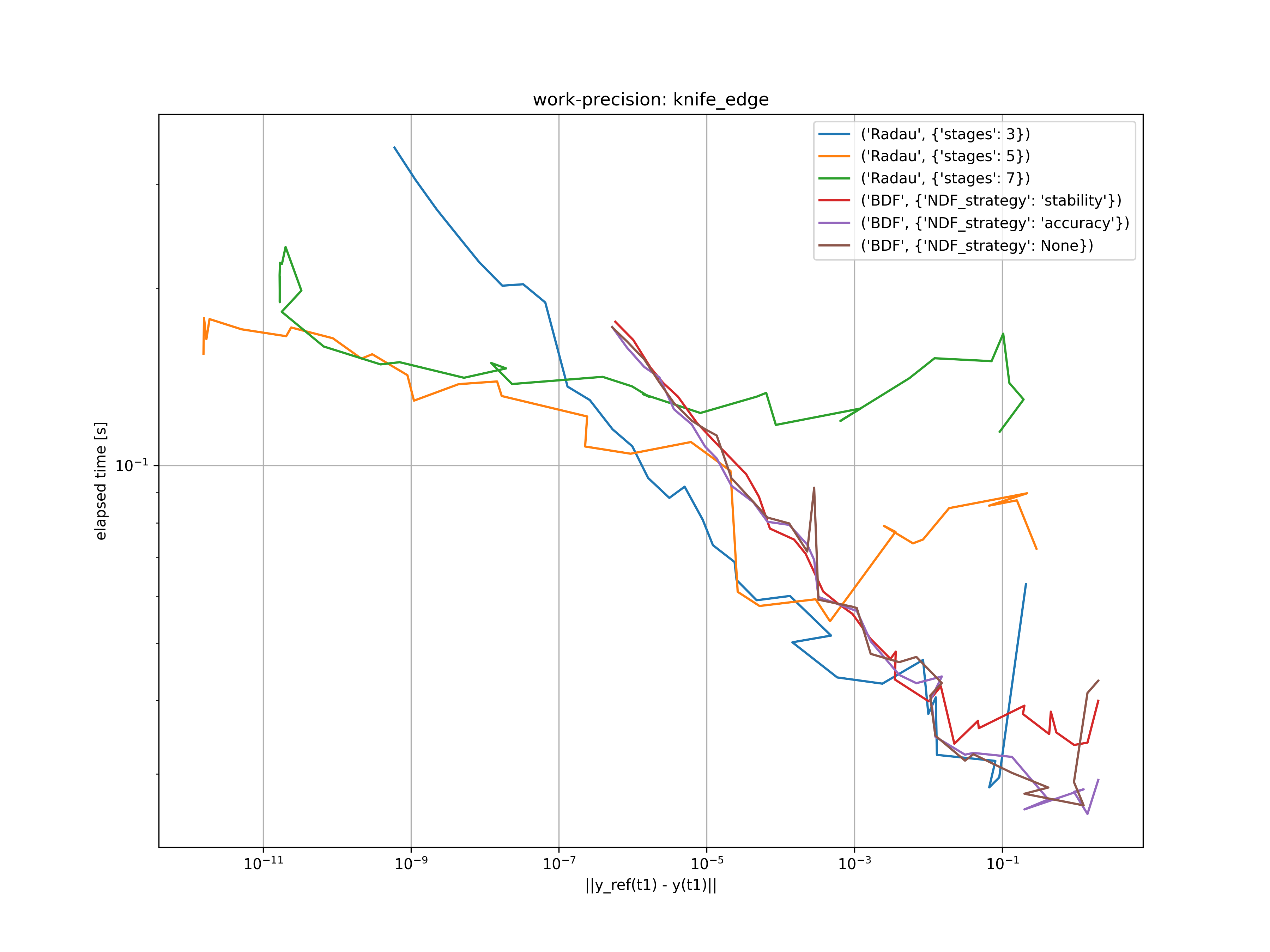
The knife edge index 2 problem is a simple mechanical example with nonholonomic constraint. It is described by the system of differential algebraic equations
Since the implemented solvers are designed for index 1 DAE's we have to perform some sort of index reduction. Therefore, we transform the semi-explicit form into a general form as proposed by Gear. The resulting index 1 system is given as
For the initial conditions
with the Lagrange multiplier
This problem is solved for
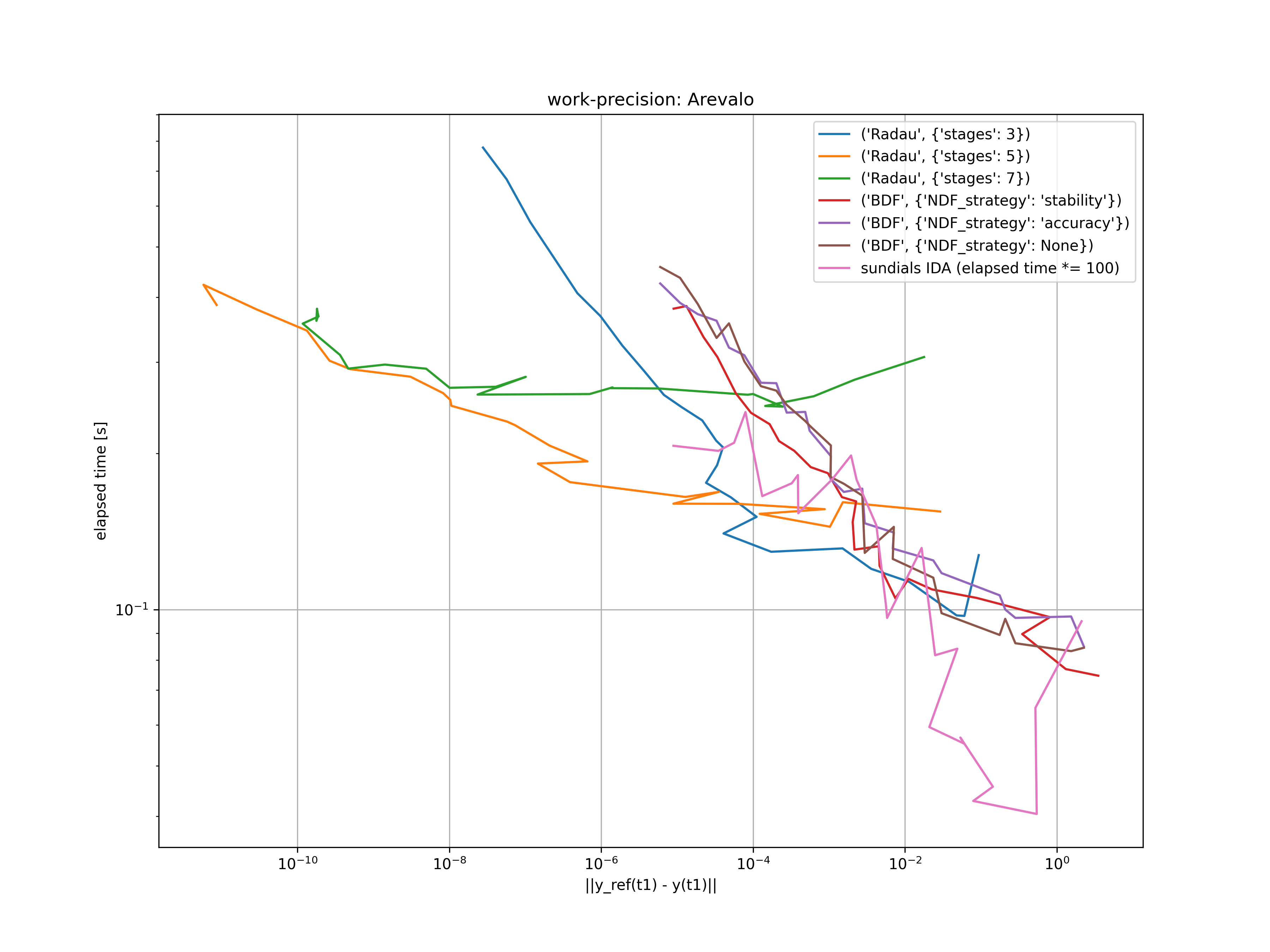
Arevalo's index 3 problem describes the motion of a particle on a circular track. It is described by the system of differential algebraic equations
Since the implemented solvers are designed for index 1 DAE's we have to perform some sort of index reduction. Therefore, we use the stabilized index 1 formulation of Hiller and Anantharaman. The resulting index 1 system is given as
The analytical solution to this problem is given by
with the Lagrange multipliers
This problem is solved for
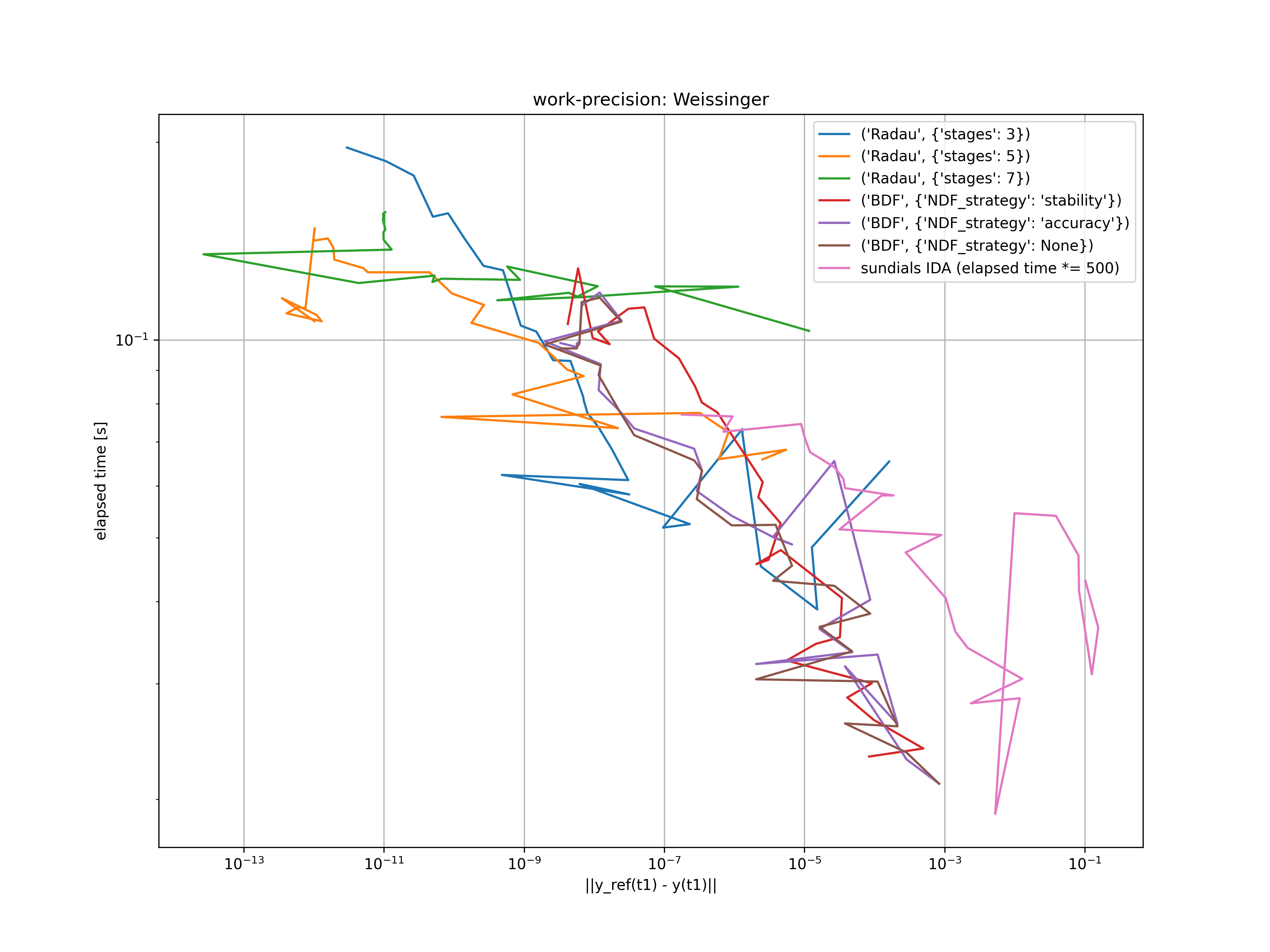
A simple example of an implicit differential equations is called Weissinger's equation
It has the analytical solution
Starting at
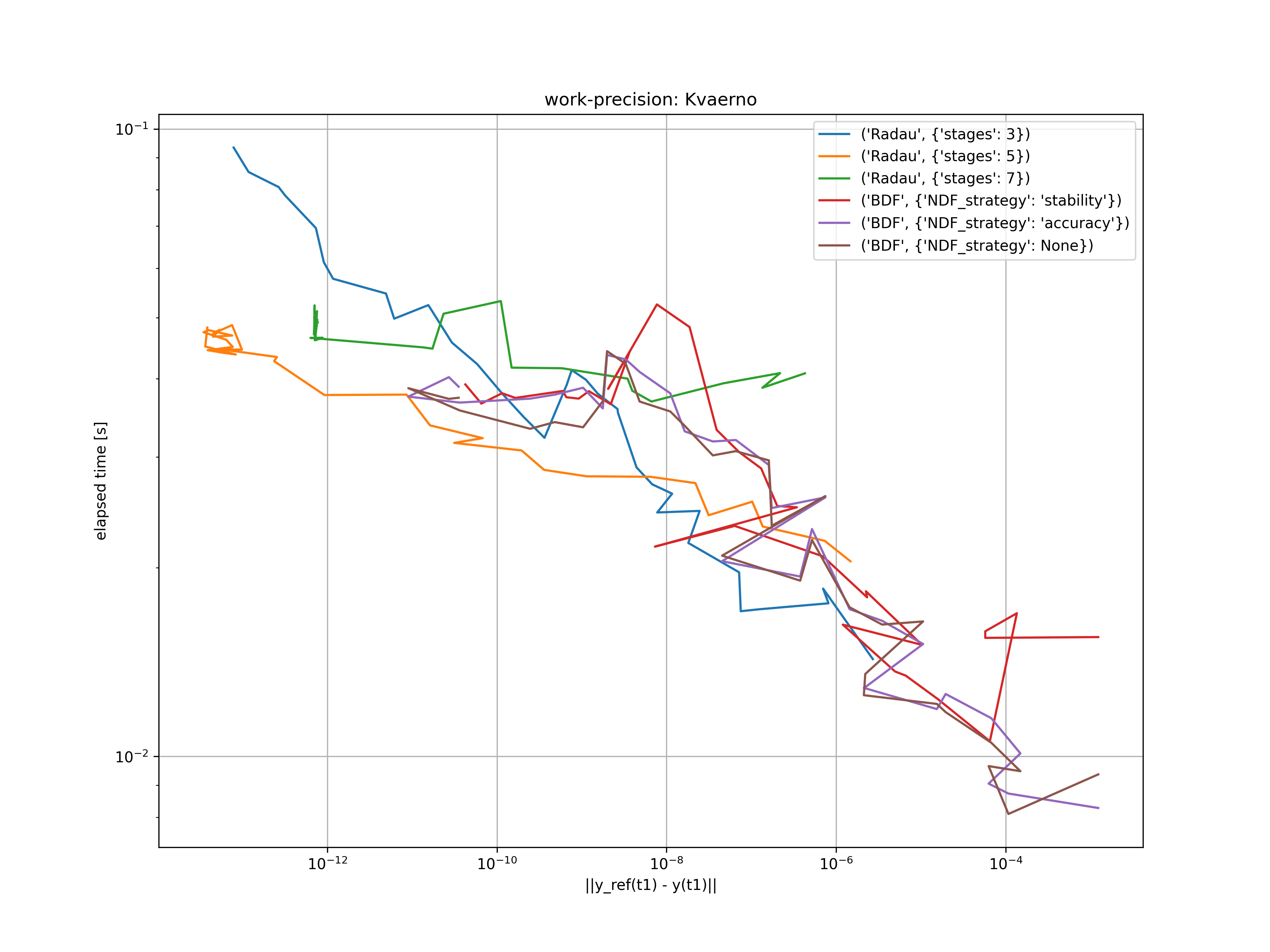
In a final example, an nonlinear index 1 DAE is investigated as proposed by Kvaernø. The system is given by
It has the analytical solution
Starting at
An editable developer mode can be installed via
python -m pip install -e .[dev]The tests can be started using
python -m pytest --cov