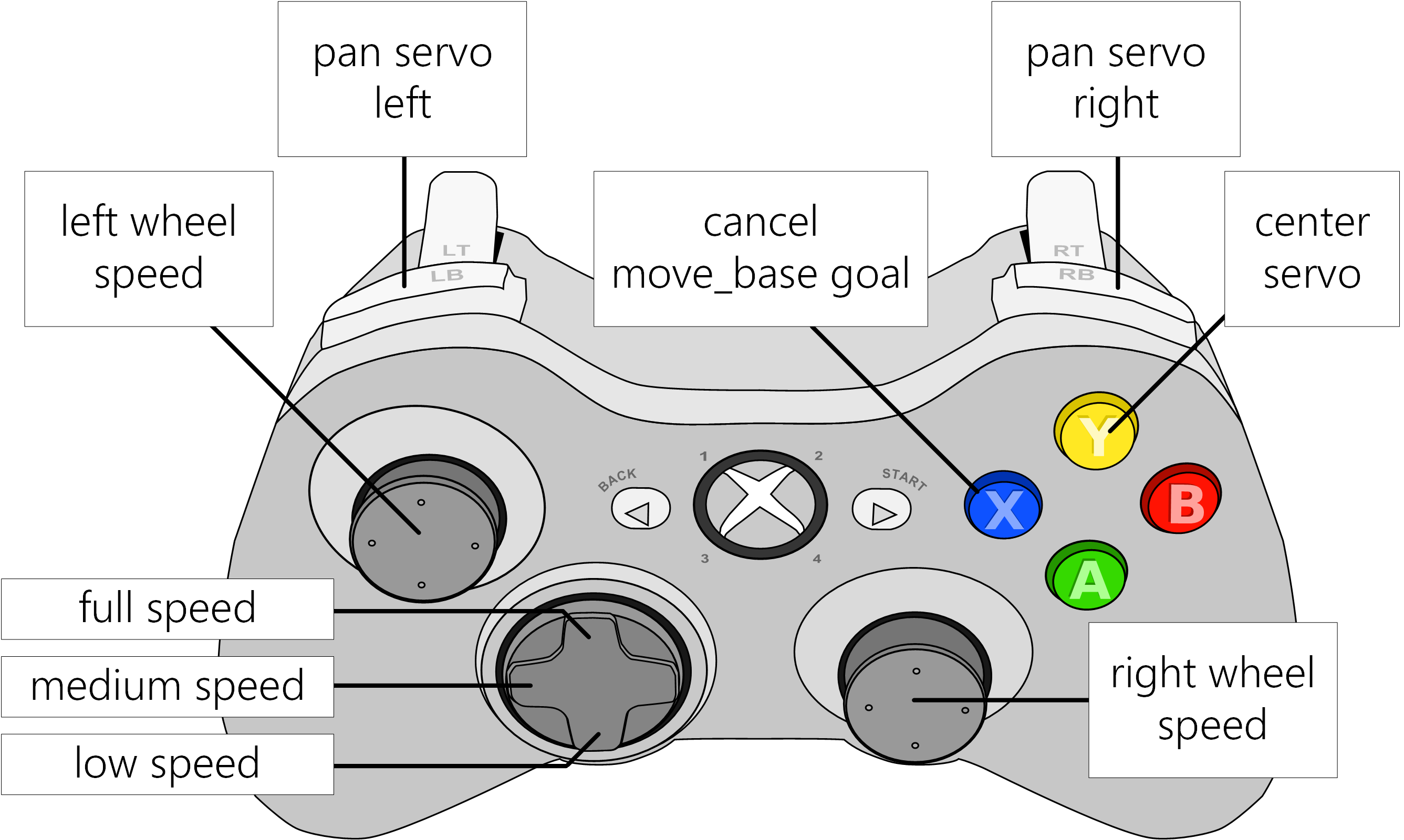
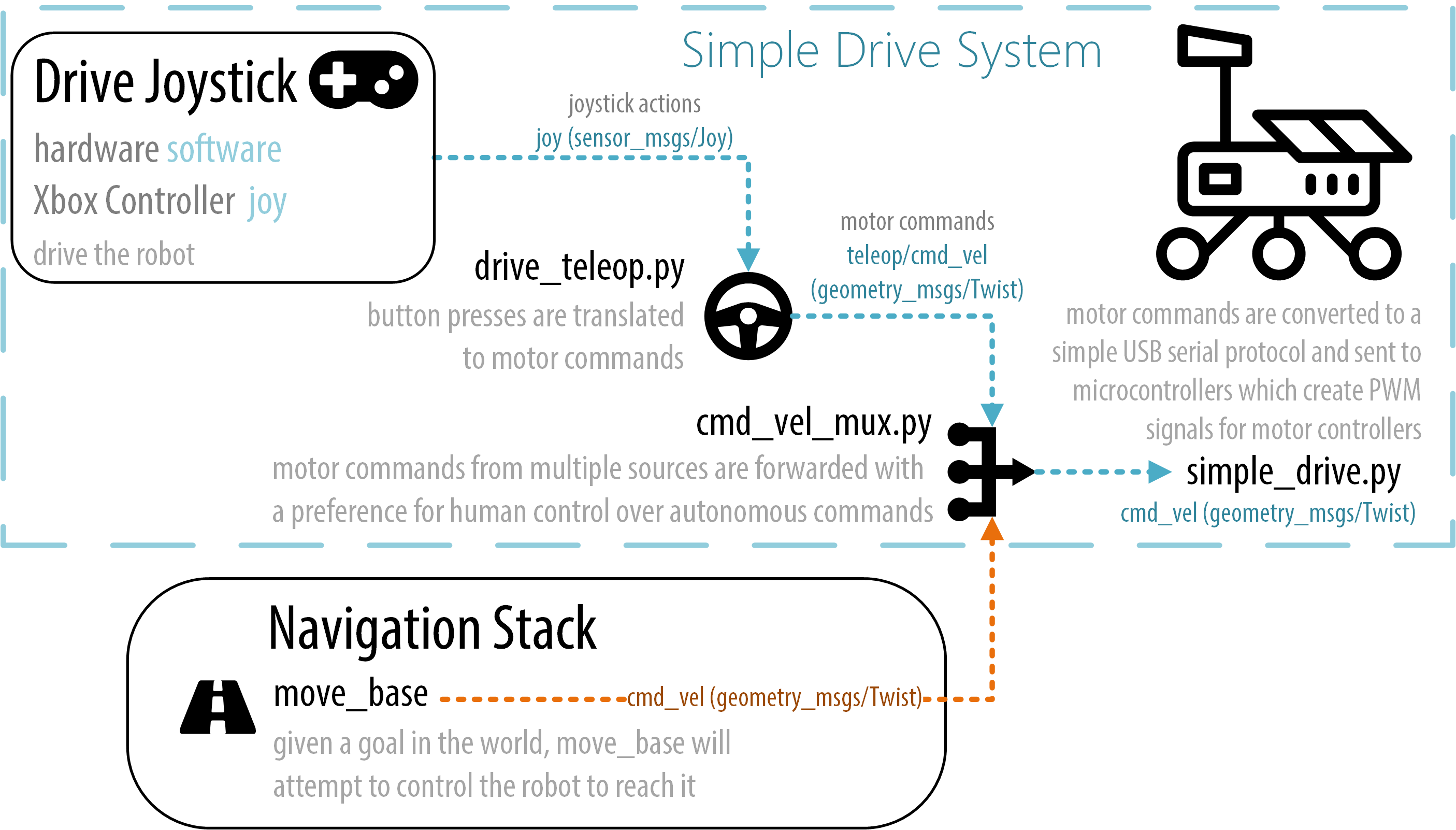
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive