C++ library for HMC5883L magnetometer for I2C communication with Arduino Wire library. Main features:
- read raw data,
- read scaled data,
- self test calibration,
- soft and hard iron compensation,
- some minor changes.
The library is intended to work without any user interference, just open project and upload working example and use it.
Library uses I2C Interface, I2C Sensor Interface to simplify and unify working with I2C devices. The library also uses Status Class which is optional.
The working example for this library is written in Atmel Studio 7 with Visual Micro addon. But it is possible to run it with Arduino IDE by adding files to project (probably there will be need to change the #include paths).
- Software:
- Atmel Studio 7 (tested) or Visual Studio,
- Visual Micro addon for above AS7 or VS.
- Hardware:
- Arduino Due (tested) or Arduino Uno (any ATmega 328P) board,
- HMC5883L board or any IMU sensor with HMC5883L.
| HMC5883L board | Due board | Uno board |
|---|---|---|
| DRDY | 19* | any free pin* |
| SCL | SCL (21) | SCL (A4) |
| SDA | SDA (20) | SDA (A5) |
| VCC 3.3V | 3.3V | 3.3V |
| VCC 5V | - ** | 5V |
| GND | GND | GND |
*To change pin number use HMC5883L_A_DATA_READY_PIN define in Config.h file.
**The Due MCU cannot be exposed to the voltage above 3.3V level!
To see a real-life example open AS7 project file HMC5883L_.atsln and upload the HMC5883L_.ino to a micro-controller. You should see something like that on Serial Monitor (baud rate = 115200):
2 Serial initialized with baudrate = 115200
167 Found HMC5883L searching device with ID = 0x1e
179 X = 381.32 Y = 61.95 Z = -528.25
185 X = 381.32 Y = 61.95 Z = -528.25
190 X = 382.15 Y = 61.95 Z = -523.16
196 X = 383.21 Y = 63.79 Z = -526.71
...
The library by default provide the fastest output rate, it is about 160 Hz, by using DDRY HMC5883L pin.
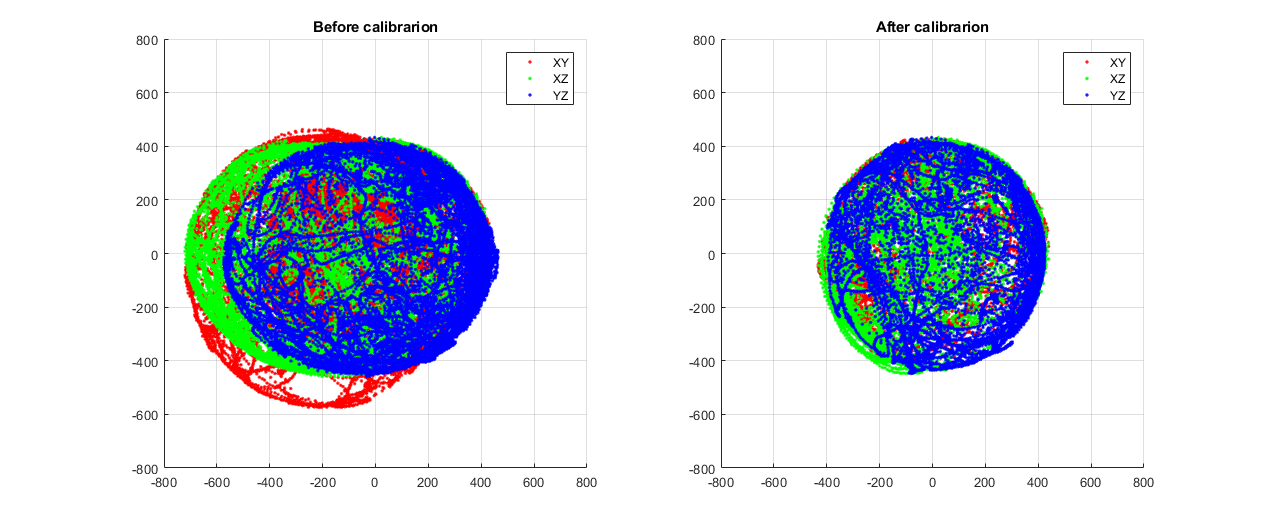
Due to manufacturing process, magnetometers have some problems with the data quality. In other words, to get the best accuracy, you need to calibrate it.
There are two kind of problems:
- soft iron,
- hard iron.
The library provide the way to obtain magnetic data from magnetometer and use them in MATLAB script to calculate soft and hard iron compensation parameters. Read the instructions here.
The result of this calibration is shown below:
HMC5883L::getDataReadyFlag() method can be polling in loop, which provide the fastest readout. There is a mechanism using external interrupts without blocking the processor.
if(Magnetometer.getDataReadyFlag())
{
Magnetometer.read();
...
}